


Bewegingsplatform voor een zweefvliegtuigsimulator
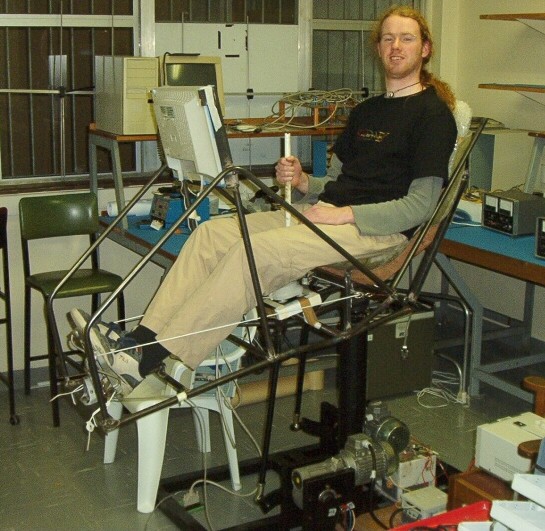
Voor mijn stage aan de universiteit van Stellenbosch (Zuid Afrika) heb ik gewerkt aan het ontwerp en de bouw van een low-cost bewegingsplatform voor een zweefvliegtuigsimulator. De simulator was bedoeld om beginnende zweefvliegpiloten te helpen met het oefenen van opstijgen (ofwel via een lier of via aero-tow; het zweefvliegtuig achter een motorvliegtuig gesleept en zo de lucht in getrokken) en landen. Door dit te oefenen in de simulator heb je minder tijd nodig in het echte zweefvliegtuig en kun je dus sneller solo gaan vliegen/zweven.
Het platform voor de simulator moest in staat zijn om simultaan een pitch- en roll-beweging te maken, met een maximale rotatie van 30 graden voor beide assen.
Om deze grote rotatiehoeken te kunnen bereiken hebben we een homkinetische koppeling van een aandrijfas van een auto gebruikt: de koppeling was in staat de gewenste uitslagen te bereiken en was stijf in de yaw-richting. Het platform werd aangedreven door 2 electromotoren, 1 voor pitch en 1 voor roll. De pyramidevormige constructie van het buizenframe van het platform zelf was bedoeld om het zwaartepunt dichter naar het rotatiepunt te brengen en daarmee de benodigde krachten te verminderen.





Boeing737 Simulator
Ik heb 2 jaar gewerkt bij Sim-Industries, een jong bedrijf dat vluchtsimulatoren ontwerpt en bouwt voor de professionele markt (opleiden van verkeersvliegers). Voor European Pilot Selection & training (EPST) in Maarssen hebben we een fixed-base Boeing737NG simulator gebouwd. De simulator bestaat uit een afgesloten cabine met daarvoor een gekromd 180graden scherm voor de outside visual, een cockpit met werkende schermen, meters en knoppen inclusief een middenconsole en overhead panels. De stuurkolommen en de elevator trim wielen zijn aangedreven.
Ik ben verantwoordelijk geweest voor het modelleren en implementeren van de verschillende systemen in de cockpit zodat ze hetzelfde reageren als in het echte vliegtuig. Daarnaast heb ik het flight model aangepast zodat de responsies van het vliegtuig overeenkwamen met de referentiedata. De simulator is FNPT2 goedgekeurd.




Haptische feedback animatie voor Nissan
De TU Delft heeft voor Nissan gewerkt aan een haptische feedback voor het stuur van een auto. De feedback is bedoeld om de bestuurder te helpen met het nemen van bochten en voor het ontwijken van obstakels, bijvoorbeeld als de bestuurder is afgeleid; een beetje vergelijkbaaar met een ruiter te paard. Er is een presentatie gemaakt om het management van Nissan van het nut en de mogelijkheden te overtuigen. Ik heb hiervoor een animatie gemaakt ter ondersteuning. Naar aanleiding van de de presentatie is extra geld toegekend voor verdere ontwikkeling.
Helaas kan ik de animatie zelf niet tonen wegens een non-disclosure overeenkomst.
CP-GPS animation
De oriëntatie van een object kan worden gemeten met een hoge graad van nauwkeurigheid door gebruik te maken van GPS (Global Positioning System) antennes en het draaggolf signaal van GPS satellieten. Een nieuwe aanpak van dit probleem is ontwikkeld bij het Aerospace Software en Technologies Institute (ASTI) die een hogere nauwkeurigheid kan geven.
Dit is natuurlijk erg nuttig voor bijvoorbeeld landmetingsbedrijven. Er is een presentatie gegeven aan verschillende van deze bedrijven om steun te vinden voor verdere ontwikkeling van de methode. Om de essentie van de nieuwe methode te verduidelijken zonder in te veel technische details te treden is een animatie gemaakt. Deze animatie kan
hier worden bekeken.
De eerste animatie belicht kort hoe conventionele positiebepaling via een driehoeksmeting met GPS werkt. De tweede animatie toont het CP-GPS concept: de fase van de draaggolf van de GPS satelliet naar de twee antennes tesamen met de revelante geometrie. Uit de animatie wordt duidelijk dat er meerdere oplossingen kunnen zijn wanneer het aantal cycli tussen de antennes onbekend is. Het snijpunt van de cirkels bepaalt de locatie van de ene antenne ten opzichte van de ander. Hieruit volgt een schatting van de orientatie van het object waar de antennes aan zijn bevestigd.